|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
Оптоэлектронные детекторы движения
Оптоэлектронные детекторы движения являются самыми популярными датчиками, используемыми в охранных системах. Они используют электромагнитные излучения в оптическом диапазоне длин волн: 0.4...20 мкм. Этот диапазон включает в себя видимую, ближнюю ИК и часть дальней ИК областей спектра. Основное назначение оптоэлектронных детекторов — обнаружение двигающихся людей и животных. Такие дет екторы работают на расстоянии до нескольких сотен метров и в зависимости от конкретных условий применения могут иметь либо узкое, либо широкое поле наблюдения. Принцип действия оптических датчиков движения основан на детектировании излучений (либо видимых, либо нет), исходящих от поверхности движущегося объекта в окружающую среду. Таким излучением может быть либо собственное излучение объекта, либо отраженный от него свет внешнего источника. В первом случае речь идет о пассивном детекторе, во втором — об активном. Очевидно, что активный датчик нуждается в дополнительном источнике излучений, который может быть дневным светом, электрической лампой, ИК светоизлучающим диодом (СИД) и т.д. Пассивные детекторы регистрируют излучение среднего и дальнего ИК диапазона спектра от объектов, имеющих более высокие температуры по сравнению с окружающей средой. Оба вида детекторов для обнаружения объектов используют оптическую контрастность. Оптоэлектронные и ультразвуковые детекторы, а также микроволновые датчики имеют разные области применения. В настоящее время оптоэлектронные устройства применяются, в основном, для качественного, а не количественного обнаружения присутствия движущихся объектов. Другими словами, оптоэлектронные детекторы очень полезны для индикации состояния объекта: движется он или стоит, но они не могут отличить один движущийся объект от другого, поэтому они никогда не используются для точного определения расстояния до объекта и измерения его скорости. Основные области применения оптоэлектронных датчиков движения — охранные системы (для обнаружения грабителей), устройства управления подачей энергии (включение и выключение света), а также, так называемые, «умные дома», в которых они управляют различными бытовыми приборами: кондиционерами, фенами, проигрывателями и т.д. Также они могут быть использованы в роботах, игрушках и т.д. Основными достоинствами оптоэлектронных детекторов движения являются простота и низкая стоимость. Структуры датчиков Основная структура оптоэлектронного детектора движения показана на рис. 6.9А. Вне зависимости от типа применяемого чувствительного элемента обязательными компонентами детектора являются: устройство фокусировки (линза или фокусирующее зеркало), светочувствительный элемент и пороговый компаратор. Оптоэлек-тронный детектор движения похож на фотокамеру. Его система фокусировки также создает на фокальной плоскости изображение поля наблюдения. Хотя в нем нет механического затвора, роль пленки в нем играет светочувствительный элемент. Этот элемент преобразует сфокусированный свет в электрический сигнал. 6.5. Оптоэлектронные детекторы движения 265 Рассмотрим детектор движения, смонтированный в комнате. Фокусирующая линза создает на фокальной плоскости, где расположен светочувствительный элемент, изображение комнаты. Если комната пустая, изображение является статическим, и выходной сигнал этого элемента является постоянным. Когда злоумышленник проникает в комнату и перемещается в ней, его изображение на фокальной плоскости также движется. В определенный момент времени тело злоумышленника попадает в зону, расположенную под углом а к оси линзы, и его изображение перекрывает часть светочувствительного элемента. Здесь необходимо понять, что на выходе детектора сигнал появляется только тогда, когда изображение объекта попадает на чувствительную поверхность датчика: нет перекрытия — нет сигнала обнаружения. Считаем, что тело злоумышленника создает изображение, электромагнитный поток излучения от которого отличен от потока в стационарном режиме. Тогда выходной сигнал светочувствительного элемента изменится на величину V. Другими словами, для того чтобы обнаружить движущийся объект, его оптическая контрастность должна отличаться от контрастности окружающих предметов. На рис. 6.9Б показан процесс сравнения выходного сигнала с двумя пороговыми напряжениями, выполняемый на оконном компараторе. Назначение компаратора — преобразование аналогового сигнала V в двухуровневый дискретный сигнал, в котором 0 соответствует отсутствию движения объекта, а 1 — обнаружению движущегося объекта. В большинстве случаев сигнал V, снимаемый с чувствительного элемента, перед подачей на компаратор необходимо предварительно усиливать. В момент, когда изображение движущегося объекта попадает на светочувствительный элемент, напряжение на его выходе К пересекает один из уровней компаратора. На выходе компаратора при этом вырабатывается положительное напряжение, соответствующее «1», что означает обнаружение движущегося объекта в зоне наблюдения. Принцип действия этой схемы такой же как у пороговых устройств, применяемых в других типах детекторов присутствия, описанных ранее. Из рис. 6.9. видно, что оптоэлектронный детектор обладает довольно узкой зоной наблюдения. Если злоумышленник продолжит свое движение в одном направлении, его изображение никогда больше не попадет на чувствительный элемент, и хотя он будет еще находится в помещении, на выходе компаратора будет нулевой сигнал. Величина зоны наблюдения определяется площадью чувствительного элемента, а ее можно менять только в ограниченных пределах, поэтому для большинства случаев требуется применение датчиков, имеющих другие структуры, описанные далее. 6.5.1.1. Составные датчики В фокальной плоскости фокусирующего зеркала или линзы располагается несколько детекторов. При этом каждый детектор отслеживает узкую зону наблюдения, а все вместе они охраняют довольно большую площадь. Все детекторы либо поочередно подключаются к логическому устройству, либо имеют внутренние соединения друг с другом, обеспечивающие их согласованную работу.
Глава 6. Детекторы присутствия и движения объектов 6.5.1.2. Датчики со сложной формой чувствительного элемента
6.5.1.3. Искажение изображения Вместо того чтобы усложнять форму чувствительного элемента, можно разделить изображение всей наблюдаемой зоны на несколько частей. Для этого перед достаточно большим чувствительным элементом помещают специальную маску, имеющую форму, показанную на рис. 6.10Б. Маска является непрозрачной, поэтому изображение на поверхности детектора будет появляться только в местах, где ее нет. Принцип действия такого устройства такой же как у датчика со сложной формой чувствительного элемента, описанного в разделе 6.5.1.2. 6.5.1.4. Фасетный фокусирующий элемент Другой способ расширения поля обзора при использовании детектора малой площади заключается в применении составных фокусирующих элементов. Для этого линза или фокусирующее зеркало делятся на несколько маленьких зеркал или линз со скошенными гранями, называемых фасетами. Каждый фасет создает свое собственное изображение, как показано на рис. 6.11А. При движении объекта его изоб- 6.5 Оптоэлектронные детекторы движения 267 ражение будет также перемещаться по чувствительному элементу, в результате чего на его выходе сформируется переменный сигнал. Комбинируя различные фасеты, можно получить любую желательную форму зоны наблюдения, как в вертикальной, так и в горизонтальных плоскостях. Применяя правила геометрической оптики, можно определить местоположение каждого фасета линзы или зеркала, их фокусные расстояния, количество фасетов и шаг между ними (расстояние между оптическими осями двух соседних фасетов). Для оценки фокусного расстояния/каждого фасета и шага между соседними элементами р можно применять следующие формулы:
стояние каждого фасета: / = (1000 см)х(0.1см)/25 см=4 см и расстояние между оптическими осями двух соседних фасетов: р = 8 мм.
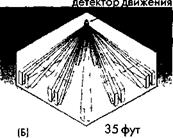
Рис. 6.11.А — фасетная линза создает вокруг чувствительного элемента серию изображений, Б — охраняемая зона сложной конфигурации, созданная составной фасет-нойлинзой 268Глава 6 Детекторы присутствия и движения объектов Комбинируя фасеты, можно реализовать линзу, охватывающую большую площадь наблюдения (рис 6 11Б), в которой каждый фасет ответственен за сравнительно узкий участок охраняемой территории Все фасеты проектируют изображение объекта на один и тот же чувствительный элемент При движении объекта он пересекает границы разных зон, в результате чего происходит модуляция выходного сигнала датчика
Поиск по сайту: |

 Если площадь чувствительного элемента детектора недостаточно велика для наблюдения за всей требуемой территорией, он может быть оптически разбит на несколько меньших частей. При этом будет получен эквивалент схемы составного датчика. Например, светочувствительный элемент может иметь форму, показанную на рис. 6.10А. Каждая часть такой структуры ведет себя как отдельный детектор излучения. Все эти детекторы соединяются либо последовательно, либо параллельно для формирования единой серпантинной структуры, с выхода которой и снимается сигнал (например, напряжение v), подаваемый в последующие логические устройства. При движении объекта его изображение перемещается вдоль поверхности сложного светочувствительного элемента, попеременно пересекая его рабочие и нерабочие участки. В результате этого с выхода детектора снимается переменный сигнал v. Площадь каждого участка светочувствительного элемента должна быть сравнима с величиной изображения объекта.
Если площадь чувствительного элемента детектора недостаточно велика для наблюдения за всей требуемой территорией, он может быть оптически разбит на несколько меньших частей. При этом будет получен эквивалент схемы составного датчика. Например, светочувствительный элемент может иметь форму, показанную на рис. 6.10А. Каждая часть такой структуры ведет себя как отдельный детектор излучения. Все эти детекторы соединяются либо последовательно, либо параллельно для формирования единой серпантинной структуры, с выхода которой и снимается сигнал (например, напряжение v), подаваемый в последующие логические устройства. При движении объекта его изображение перемещается вдоль поверхности сложного светочувствительного элемента, попеременно пересекая его рабочие и нерабочие участки. В результате этого с выхода детектора снимается переменный сигнал v. Площадь каждого участка светочувствительного элемента должна быть сравнима с величиной изображения объекта.
 где L — расстояние до объекта, d — ширина чувствительного элемента, п — количество чувствительных элементов (равномерно расположенных), а А — минимальное перемещение объекта, которое необходимо детектировать. Пусть в состав датчика входят два чувствительных элемента шириной d—\ мм, расположенных на расстоянии 1 мм друг от друга. При этом необходимо с расстояния L = 10 м обнаруживать перемещение объекта, равное Д = 25 см. Тогда, применяя формулы (6.10) и (6.11), можно найти фокусное рас-
где L — расстояние до объекта, d — ширина чувствительного элемента, п — количество чувствительных элементов (равномерно расположенных), а А — минимальное перемещение объекта, которое необходимо детектировать. Пусть в состав датчика входят два чувствительных элемента шириной d—\ мм, расположенных на расстоянии 1 мм друг от друга. При этом необходимо с расстояния L = 10 м обнаруживать перемещение объекта, равное Д = 25 см. Тогда, применяя формулы (6.10) и (6.11), можно найти фокусное рас-