|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
Гладкая опора (без трения)
Реакция опоры приложена в точке опоры и всегда направлена перпендикулярно опоре (рисунок 1).
Рисунок 1 – Гладкая опора
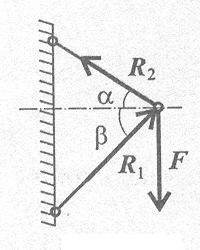
Гибкая связь (пить, веревка, трос, цепь) Груз подвешен на двух нитях (рисунок 2). Реакция нити направлена вдоль нити от тела, при этом нить может быть только растянута.
Рисунок 2 – Гибкая связь
Жесткий стержень На схемах стержни изображают толстой сплошной линией (рисунок 3).
Рисунок 3 – Жёсткий стержень Стержень может быть сжат или растянут. Реакция стержня направлена вдоль стержня. Стержень работает на растяжение или сжатие. Точное направление реакции определяют, мысленно убрав стержень и рассмотрев возможные перемещения тела без этой связи. Возможным перемещением точки называется такое бесконечно малое мысленное перемещение, которое допускается в данный момент наложенными на него связями.
Шарнирная опора Шарнир допускает поворот вокруг точки закрепления. Подвижный шарнир Стержень, закрепленный на шарнире, может поворачиваться вокруг шарнира, а точка крепления может перемешаться вдоль направляющей (площадки) (рисунок 4). вектор
Рисунок 4 – Подвижный шарнир Реакция подвижного шарнира направлена перпендикулярно опорной поверхности, т. к. не допекается только перемещение поперек опорной поверхности.
Неподвижный шарнир Точка крепления перемещаться не может. Стержень может свободно поворачиваться вокруг оси шарнира. Реакция такой опоры проходит через ось шарнира, но неизвестна по направлению. Ее принято изображать в виде двух составляющих: горизонтальной RX и вертикальной RY (рисунок 5).
Рисунок 5 – Неподвижный шарнир
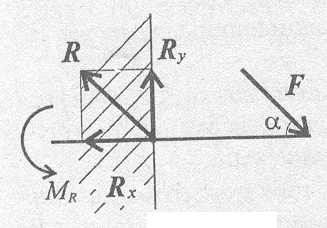
Защемление или «заделка» Любые перемещения точки крепления невозможны. Под действием внешних сил в опоре возникают реактивная сила и реактивный момент MR, препятствующий повороту (рисунок 6). Реактивную силу принято представлять в виде двух составляющих вдоль осей координат R = RX + RY.
Рисунок 6 -- Заделка
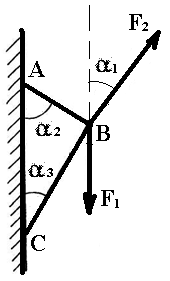
Изобразите графически схему стержневого устройства АВС и произведите расчет заданной задачи на определение усилия в стержнях стержневой системы, согласно примеру. Пример решения задачи Дано: F1 = 28кH; F2 = 42кH; α1 = 45°; α2 = 60°; α3 = 30°. Определить усилия SA и SС (рисунок 15).
Рисунок 15 – Заданная стержневая система Решение: 1. Аналитическое решение: а) рассматривает равновесие точки В, в которой сходятся все стержни и внешние силы (рисунок 15); б) отбрасываем связи АВ и ВС, заменяя их усилиями в стержнях SA и .Sc. Направления усилий примем от узла В, предполагая стержни растянутыми. Выполним на отдельном чертеже схему действия сил в точке В (рисунок 16).
Рисунок 16 – Схема действия сил в точке В в) выбираем систему координат таким образом, чтобы одна из осей совпала с неизвестным усилием, например, с SA. Обозначаем на схеме углы, образованные действующими силами с осью Х и составляем уравнения равновесия плоской системы сходящихся сил: ∑Fix = 0; F2·cos75° + F1·cos60° - SА = 0; ∑Fiу = 0; F2·cos15° - F1·cos30° - SС = 0. Из уравнений определяем усилия в стержнях; SА = F2·cos75° + F1·cos60° = 42·0,259 + 28·0,5 = 24,88 кН; SС = F2·cos15° - F1·cos30° = 42·0,966 + 28·0,866 = 16,32 кН. Знаки указывают, что оба стержня растянуты. 2. Графическое решение Выбираем масштаб сил m = 10 кН/см, тогда силы F1 и F2 будут откладываться отрезками
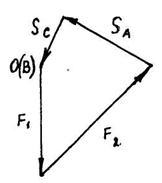
Из произвольно выбранной точки О откладываем отрезок, соответствующий величине и направлению силы F1m. Из конца этого отрезка откладываем отрезок F2m. Так как условием равновесия сходящейся системы сил является замкнутость силового многоугольника, то из начала отрезка F1m откладываем линию, параллельную вектору SС, а из конца отрезка F2m откладываем линию, параллельную вектору SA. Точка их пересечения является вершиной силового многоугольника (рисунок 17).
Рисунок 17 – Многоугольник сил Измеряя отрезки SAm и SCm и, умножая их на масштаб, находим значение SA и SC: SA = SAm·m = 2,5·10 = 25 кН; SС = SСm·m = 1,62·10 = 16,2 кН. Вычислим допущенную при графическом решении ошибку:
Ошибка должна находиться в пределах 2 %. Ответ: а) аналитическое решение: SA = 16,32 кН; Sc = 24,88 кН; б) графическое решение: SA = 16,2 кН; SС = 25 кН. 3) Сделайте выводы о приобретенных навыках определения усилия в стержнях, проанализируйте каким способом произвести расчет легче, каким точнее. 4) Ответьте на контрольные вопросы 1. Как направлена реакция связи «жёсткий стержень»? 2. Как направлена реакция связи «неподвижный шарнир»? 3. Какая система сил называется сходящейся? 4. Как строится многоугольник сил? 5. Как направлен вектор равнодействующей в многоугольнике сил? 6. Сформулируйте условие равновесия плоской системы сходящихся сил. 7. Чем определяется проекция силы на ось? 8. Чему равна величина проекции силы на ось? 9. Сформулируйте условие равновесия плоской системы сходящихся сил в аналитической форме.
Поиск по сайту: |